자율주행에 관심이 있으신 분들은 한번 쯤 들어봤을 이름, 라이더에 대해 간단한 소개를 적어보려고 합니다.
라이다는 원래 영어로 LiDAR라고 쓰는데, LASER Range Finder라는 이름으로도 쓰이는 레이저 센서 입니다. 레이저라고 하면 잘 감이 안올 수 있는데, 쉽게 말해 빛을 쏘고 돌아오는 시간으로 부터 거리를 측정하는 장비 입니다.
중학교 쯤 과학시간에 빛의 속도 라는 것을 배웠던 것 같습니다. 대충 빛의 속도는 일정하게 엄청 빠르다는 내용 입니다.
또, 비슷한 시기에 과학시간에 속도, 거리, 시간에 대한 내용을 배웠던 것도 같습니다. 대충 속도와 이동시간을 알면 거리를 계산할 수 있다는 내용 입니다.
LiDAR는 이 점을 이용한 센서인데, 우선 아래 가정을 두고 설명해 보겠습니다.
라이다의 원리

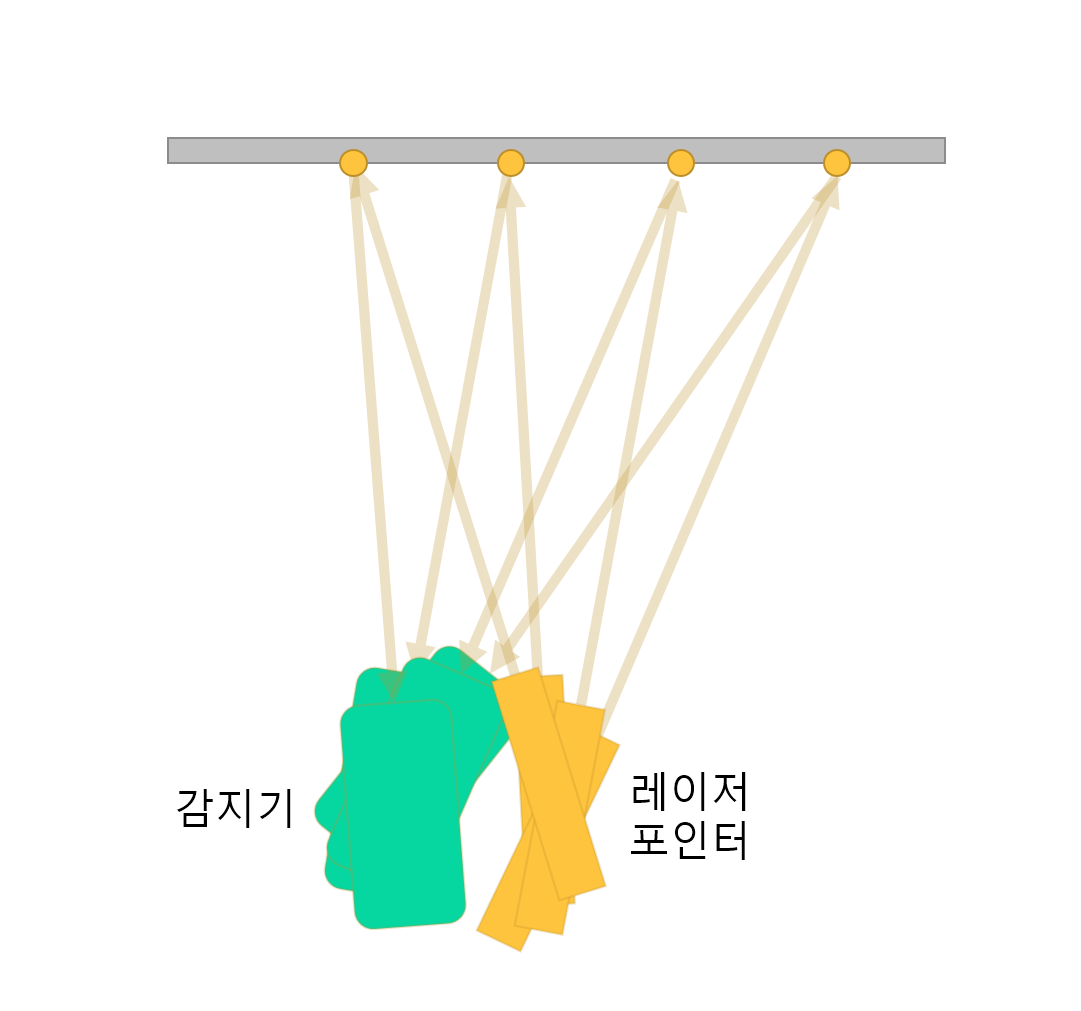
레이저 포인터가 하나 있고, 바로 옆에 이 레이저를 인식할 수 있는 레이저 감지기가 있다는 가정을 해 보겠습니다.
원래는 레이저가 꺼져있었다가, 켜는 순간의 시간, 그리고 이후 감지기에서 감지한 시간을 비교하면, 레이저 빛이 돌아오는데 걸리는 시간을 알 수 있습니다. 여기서, 빛의 이동속도가 항상 같다는 점을 이용하면, 레이저가 반사된 지점의 거리를 어느정도 정확히 계산할 수 있습니다.
만약, 이 포인터-감지기 세트가 회전을 한다면? 아래와 같이 이웃한 여러 지점의 거리를 측정할 수 있습니다.
이렇게 회전하는 포인터로 얻은 데이터를 빠르게 많이 모으면 아래와 같이 주변 환경에 대한 측정을 할 수 있게 됩니다.
이렇게 데이터를 얻는 센서를 2D LiDAR 라고 하고, 현재도 많은 차량의 스마트 크루즈(혹은 유사한) 기능을 위해 사용되고 있습니다.
만약에, 이렇게 회전하는 포인터/감지기 세트가 한 장치에 위아래로 여러 겹 있다면, 아래와 같은 데이터를 얻는 장비가 됩니다.

라이다의 장단점
위 데이터 샘플에서 보시는 바와 같이, 레이저 센서로 측정한 주변환경은 상당히 정확한 편 입니다. 실제로, Nvidia, Waymo 등 테슬라를 제외한 거의 모든 자율주행 업체들이 라이다 센서 데이터를 가정하는 자율주행을 개발하고 있습니다. 그래서 처음 테슬라에서 라이다를 없애겠다는 발표를 했을 때, 많은 전문가들이 당황할 수 밖에 없었습니다.
테슬라에서는 왜 라이다를 쓰지 않겠다고 했을까요? 제가 추측해 보는 이유는 이렇습니다.
- 카메라 보다 많이 비싸다.
- 카메라 보다 물리적으로 약하다.
- 시야확보를 위해 거추장스럽게 달려야 하거나, 여러 방향을 보는 다수가 달려야 한다 (결국 비용이 비싸다).
- 자율주행을 완벽에 가깝게 할 만큼 데이터가 조밀하지 않다.
이정도로 추측하고 있습니다.
요즘은 많이 가격이 내려왔지만, 처음 일론 머스크가 라이다를 사용하지 않겠다고 선언한 시점만 해도 Velodyne 라이다 하나에 1,000만원 내외였습니다. 대량 구매시 카메라 하나 단가가 몇만원 하는 점을 생각해 보면 8개를 달아도 라이다에 비할 바의 가격은 아니죠.
Velodyne의 라이다를 기준으로 보면, 내부에서 실제로 레이저 모듈이 기계적으로 회전하는 방식 입니다. 이러한 정밀장비가 험하게 돌아다니는 자동차에 있다 보면 오래 유지가 어렵지 않을까 하는 개인적인 의견이 있습니다.
위에서 보시다싶이, 3D 라이다라는 장비는 사실 여러겹의 2D를 합친 2.5D에 가깝습니다. 이렇다 보니 상황에 따라서는 자율주행을 위한 판단을 내리기에 데이터가 너무 적을 수 도 있겠다는 생각이 듭니다. 반대로, 카메라로 예측하는 주변 환경은 라이다보다는 정확도가 많이 떨어지지만, 더 조밀한 데이터를 얻을 수 있는 장점이 있습니다.
이 외에도 다른 라이다장비로 부터 발생되는 간섭 등 여러 난해한 문제들이 해결되기 어려워 테슬라에서는 아예 방식을 바꾸게 된 것이 아닐까 생각하고 있습니다.
'Robotics' 카테고리의 다른 글
| 프로그래밍 언어는 뭘 배워야 하나 - 컴퓨터 언어 선택하기 (12) | 2023.02.08 |
|---|---|
| 로봇하는 사람이 본 ChatGPT - OpenAI (20) | 2023.01.17 |
| 연구논문의 발행 - 학회, 저널, 그리고 arxiv (5) | 2022.11.08 |
| [AI Day 2022] 테슬라가 FSD 베타를 적극적으로 진행하는 이유 - 경로편 (41) | 2022.10.07 |
| [AI Day 2022] 로봇하는 사람이 본 테슬라 휴머노이드 - 시각편 (34) | 2022.10.05 |